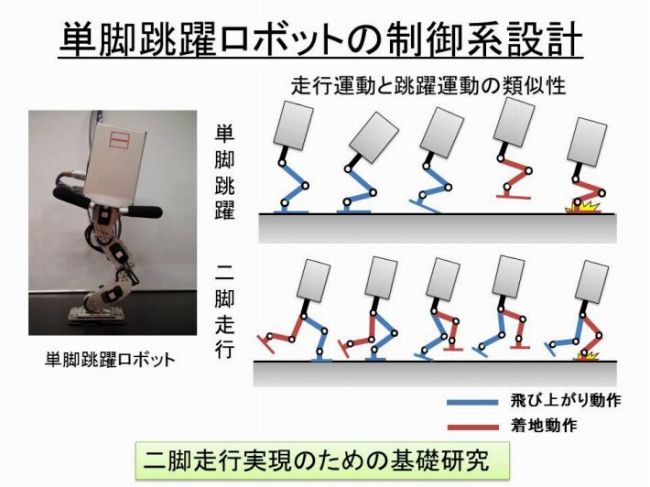
将来的にロボットが人間生活に入り,人間をサポートすることを想定するとロボットを人間に合わせることで汎用性が高くすることができる.二足走行の片足に着目すると一脚跳躍運動と類似していることが分かる. 最終的には二脚走行実現をめざし,跳躍ロボットの研究を行っている.跳躍ロボットはヒューマノイドロボットの走行速度の上昇,不整地踏破能力および障害物回避能力の向上等の応用が期待される.



将来的にロボットが人間生活に入り,人間をサポートすることを想定するとロボットを人間に合わせることで汎用性が高くすることができる.二足走行の片足に着目すると一脚跳躍運動と類似していることが分かる. 最終的には二脚走行実現をめざし,跳躍ロボットの研究を行っている.跳躍ロボットはヒューマノイドロボットの走行速度の上昇,不整地踏破能力および障害物回避能力の向上等の応用が期待される.