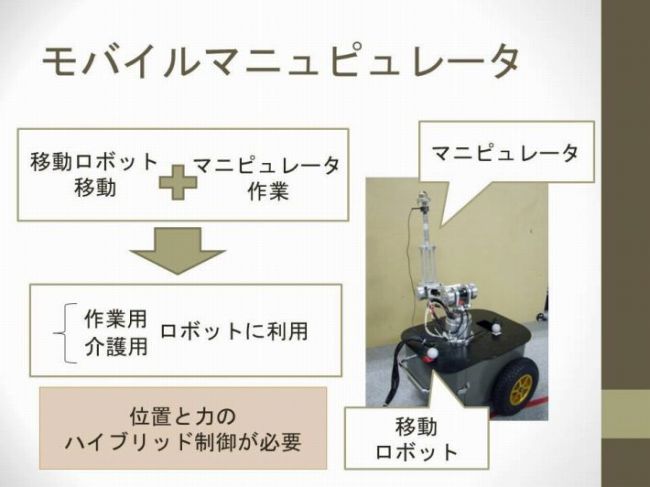
モバイルマニピュレータは移動ロボットにのマニピュレータを搭載したシステムであり,本研究では 2輪車両3リンクのモバイルマニピュレータを使用しています.ロボットによる移動とマニピュレータによる作業という,2つの機能を備えていることから,作業用,介護用ロボットとしての利用ができます.しかし,これらの機能を実現するには,位置と力のハイブリッド制御が必要となり高度な制御が必要となります.



モバイルマニピュレータは移動ロボットにのマニピュレータを搭載したシステムであり,本研究では 2輪車両3リンクのモバイルマニピュレータを使用しています.ロボットによる移動とマニピュレータによる作業という,2つの機能を備えていることから,作業用,介護用ロボットとしての利用ができます.しかし,これらの機能を実現するには,位置と力のハイブリッド制御が必要となり高度な制御が必要となります.