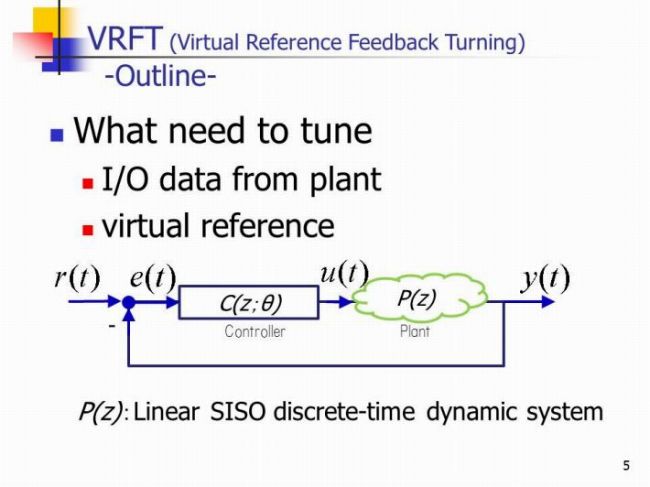
既存の制御方法は制御対象を数式モデルとして表現する場合が多くなっています.その際,モデル化困難な制御対象やモデル化誤差が大きい制御対象に対しては適用することができません.そのため,モデル化を必要としないData-basedな制御方法が必要となります.本研究ではData-basedな制御方法のなかで繰り返しの設計を必要としないVRFTに注目し,人間機械システムへの適用を目指しています.



既存の制御方法は制御対象を数式モデルとして表現する場合が多くなっています.その際,モデル化困難な制御対象やモデル化誤差が大きい制御対象に対しては適用することができません.そのため,モデル化を必要としないData-basedな制御方法が必要となります.本研究ではData-basedな制御方法のなかで繰り返しの設計を必要としないVRFTに注目し,人間機械システムへの適用を目指しています.