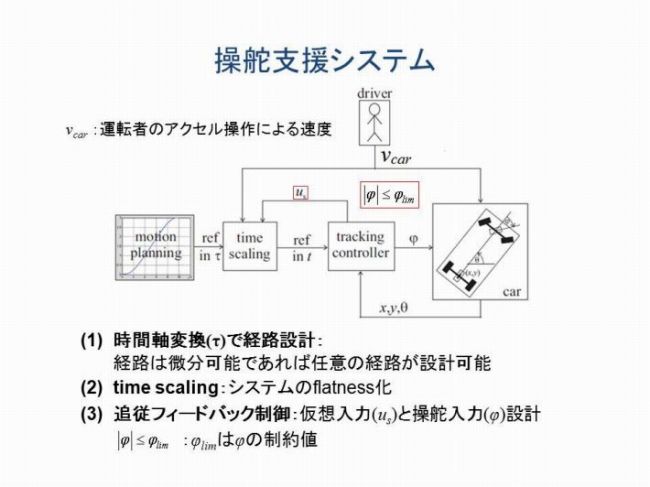
超高齢化社会を迎える国々においては,高齢者の自動車事故防止のための自動車技術の開発は緊急かつ重要な課題となっています.本研究では,高齢者の運転支援システムの構築のための基礎研究として,操舵支援を行う新たな制御系設計手法の提案を行っています.




超高齢化社会を迎える国々においては,高齢者の自動車事故防止のための自動車技術の開発は緊急かつ重要な課題となっています.本研究では,高齢者の運転支援システムの構築のための基礎研究として,操舵支援を行う新たな制御系設計手法の提案を行っています.